פרק 1 מגברי מכשור
1.1 מגבר הפרש באמצעות מגבר שרת יחיד
נרצה להגביר “הפרש מתחים” - Difference Amplifier - , נוכל להשתמש בשתי הקונפיגורציות של מגבר שרת בתפקיד מגבר מהפך ומגבר שאינו מהפך:
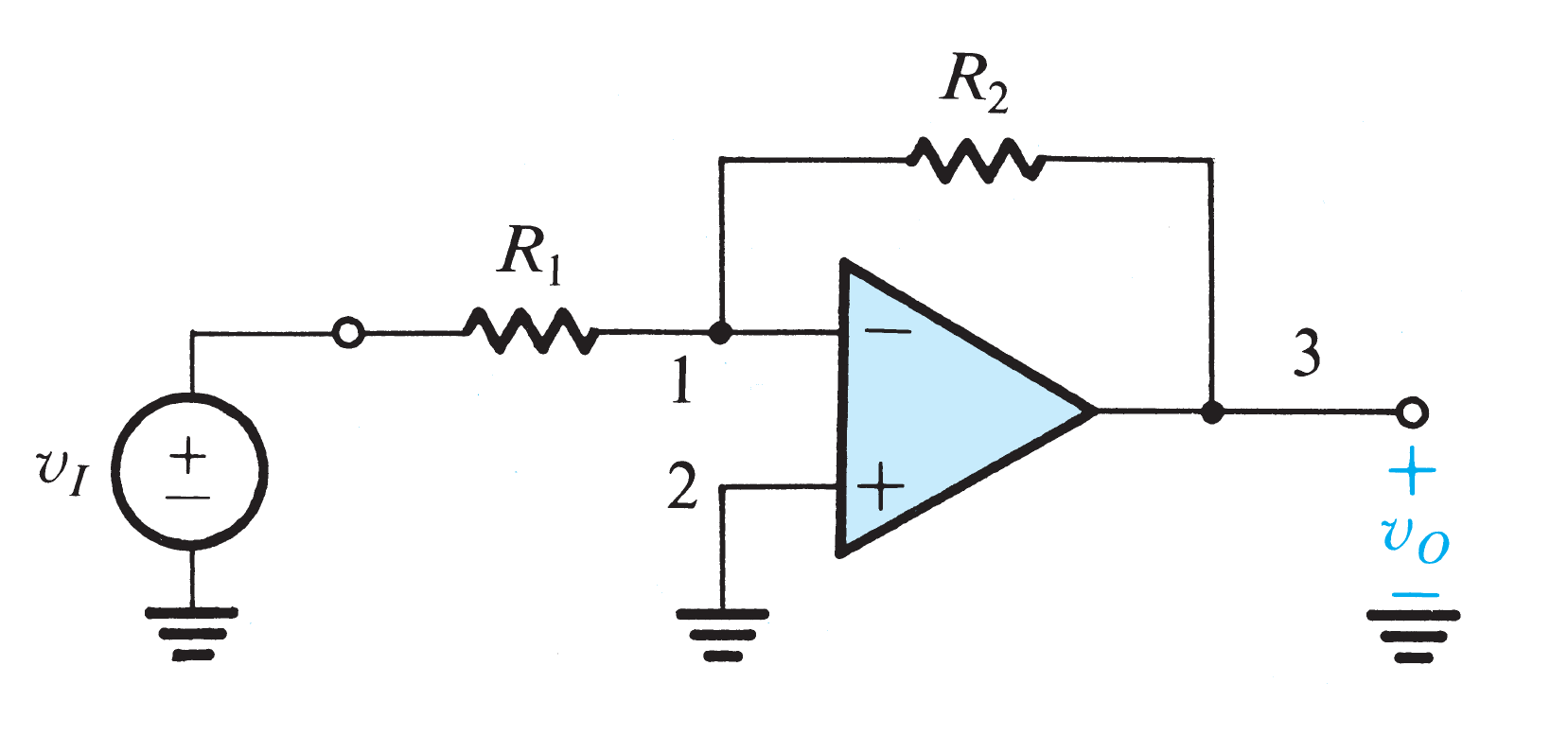
להלן מגבר שרת מהפך:
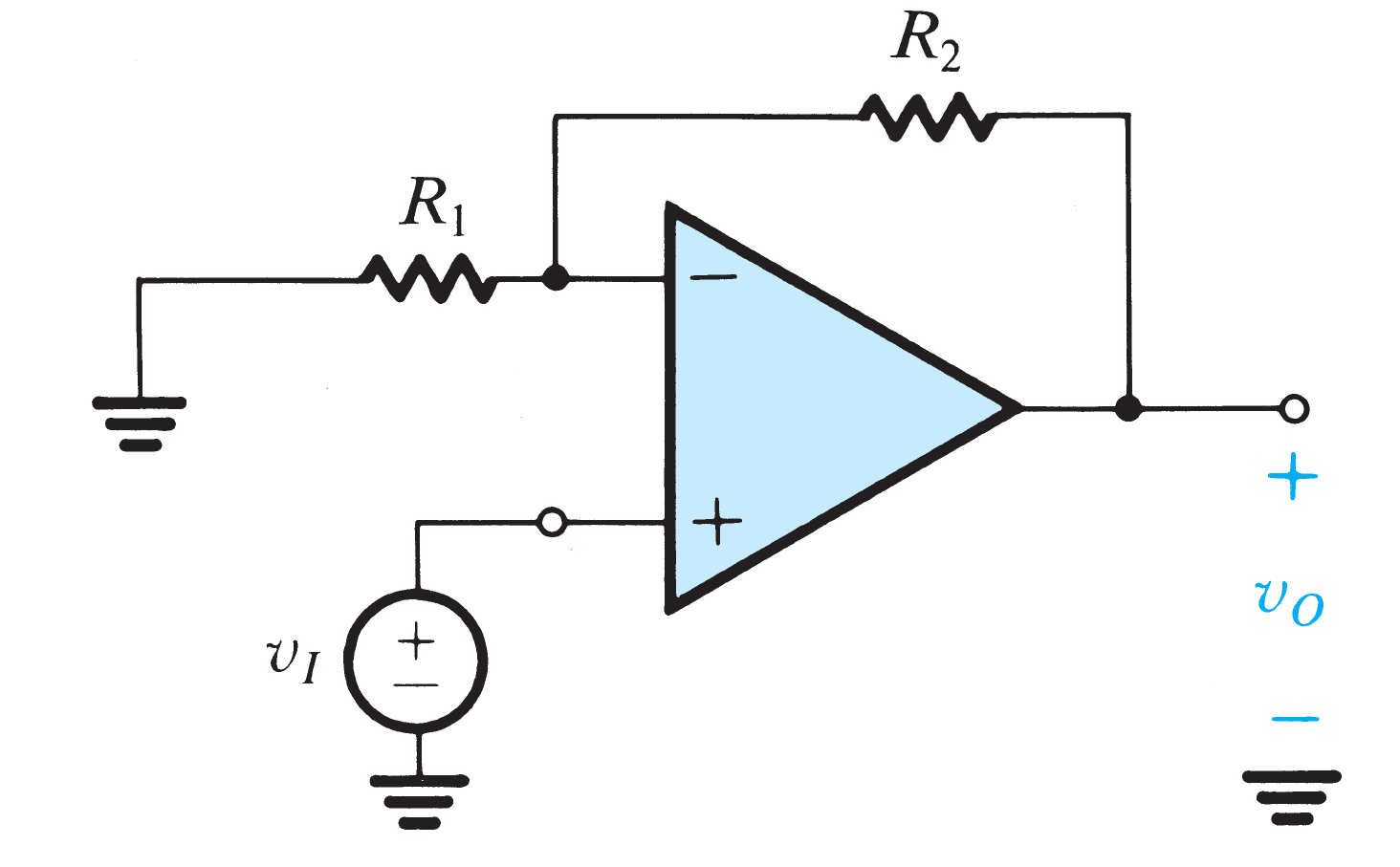
מגבר שאינו מהפך:
כאשר עבור מגבר מהפך מתקיים:
עבור מגבר שאינו מהפך מתקיים:
.
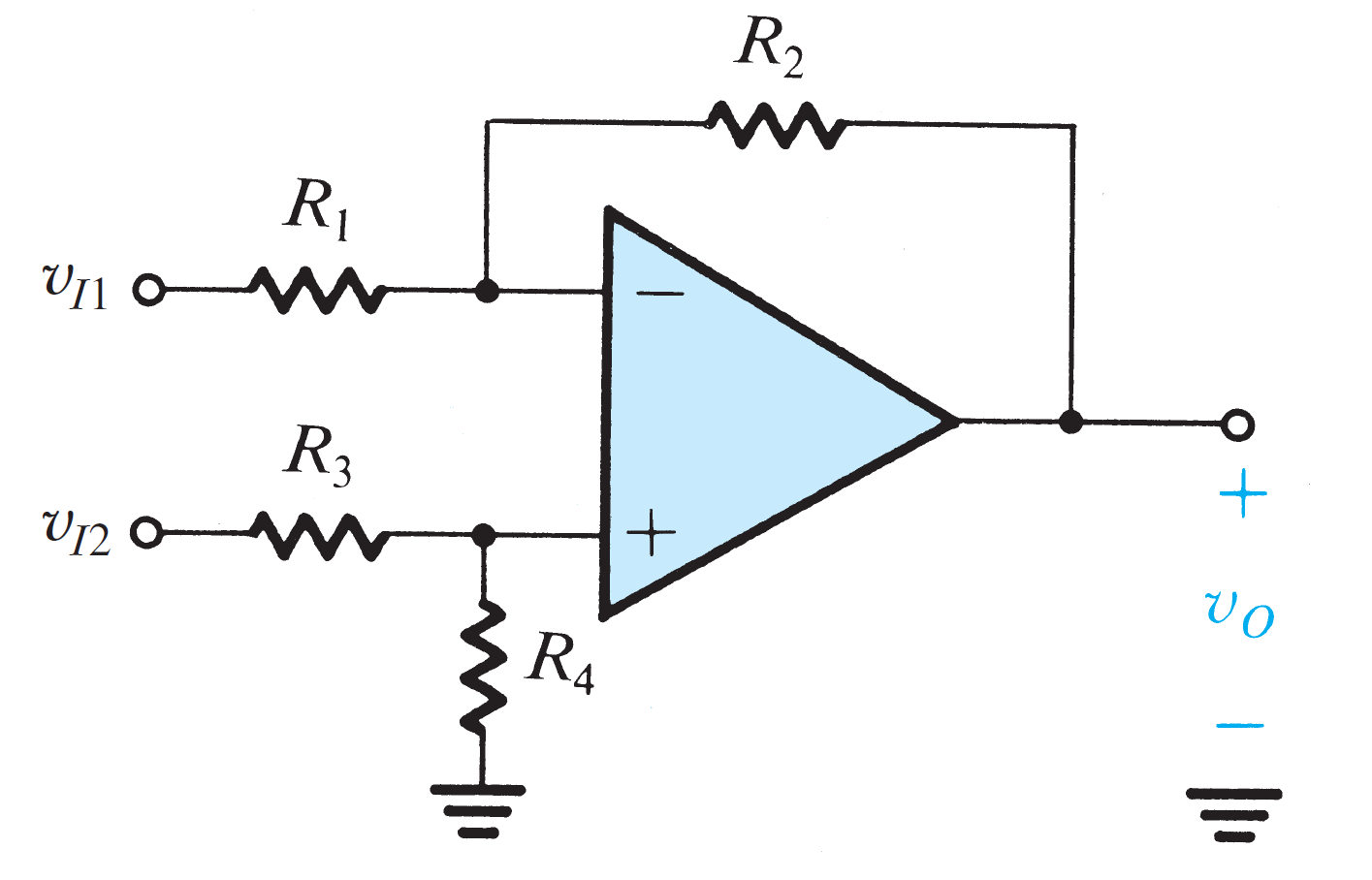
נשתמש בשתי הכניסות של המגבר שרת כדי להגביר הפרש מתחים, כלומר נאחד את שתי הקונפיגורציות של מגבר שרת מהפך ומגבר לא מהפך יחדיו, נקבל:
כאשר יש לשים לב כי במגבר שרת מהפך ושאינו מהפך הנגדים R1 ו R2 נמצאים באותו מקום, וההבדל הוא היכן מחברים את מתח הכניסה. אך מכיוון שיש הבדל בין ההגברה עם תוספת של 1 לטובת מגבר לא מהפך, יש לדאוג לקזזו כי אחרת נקבל הגברה של מתח כניסה
למרות שאינו הפרשי )כלומר common-mode(. לצורך דחיית הקומון מוד מחברים את הנגדים R3 ו R4 ככה אנחנו מנחיתים את התוספת של ה 1 להגברה לטובת המגבר שאינו מהפך.
לפיך יש לדרוש:
סך הכל ניתן לקיים את הדרישה ע”י בחירת הנגדים המקיימים את היחס הבא:
.
נקבל כי מתח המוצא הינו מגביר הפרש כך:
.
כאשר הגבר ההפרש
הינו
.
ניתן לבחור את הנגדים כך
כדי להקל על בחירת הנגדים וקיום הדרישה.
כאשר ההגבר המשותף הינו:
כלומר ההגבר המשותף הינו:
)כמובן שעבור בחירת יחס נגדים המקיים את הדרישה נקבל
(
על כל פנים, כל אי התאמה קטנה בין יחס הנגדים כבדרישה תביא לכך שההגבר המשותף אינו אפס, )כלומר CMRR סופי(.
בנוסף, באופן כללי עבור מגבר הפרש נדרש כי אימפדנס הכניסה יהיה גבוה ככל האפשר. התנגדות זו נקראת
“differential input “resistance. נניח ובחרנו
, ולפי הגדרה
, נקבל סך הכל כי
.
נניח ונרצה הגבר הפרש גבוה אזי בהכרח
צריך להיות יחסית קטןוכך התנגדות הכניסה תרד, וזה חסרון משמעותי עבור מעגל זה.
1.2 מגבר הפרש באמצעות מגבר מכשור
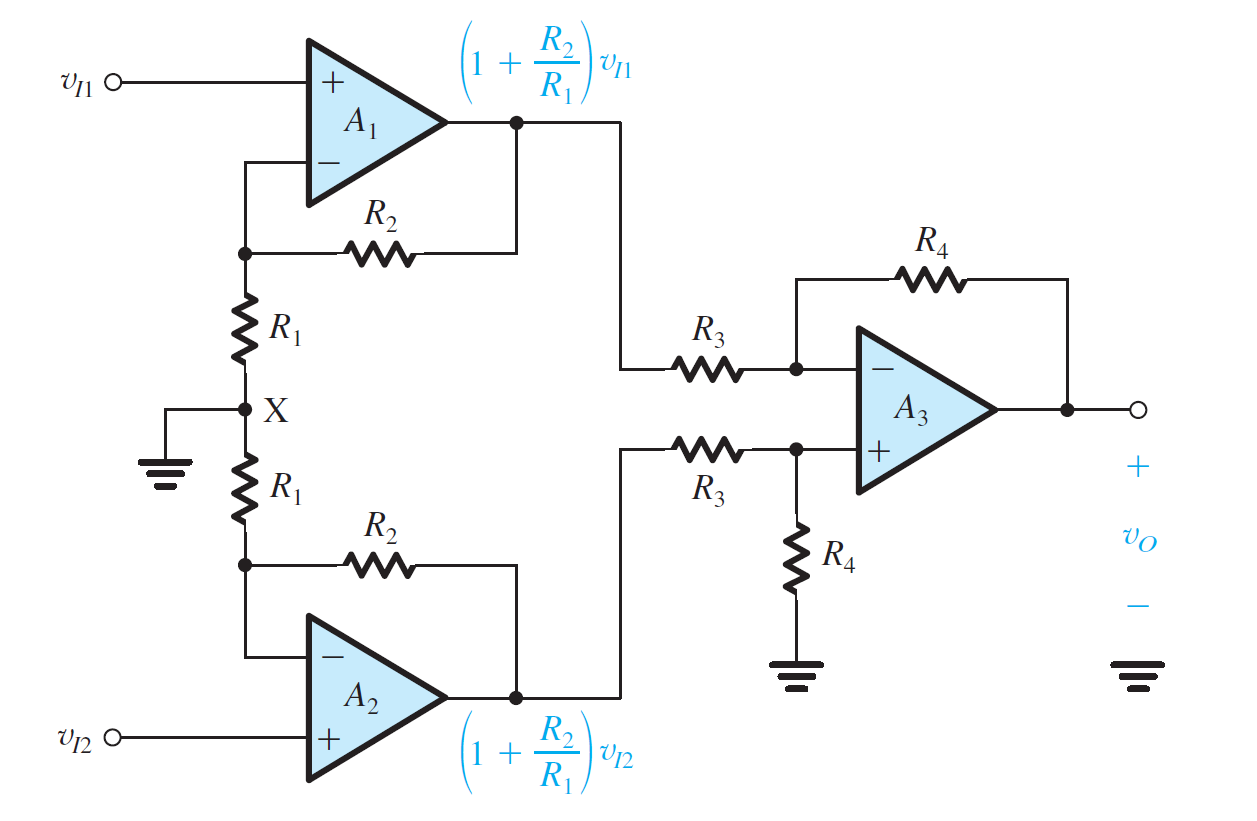
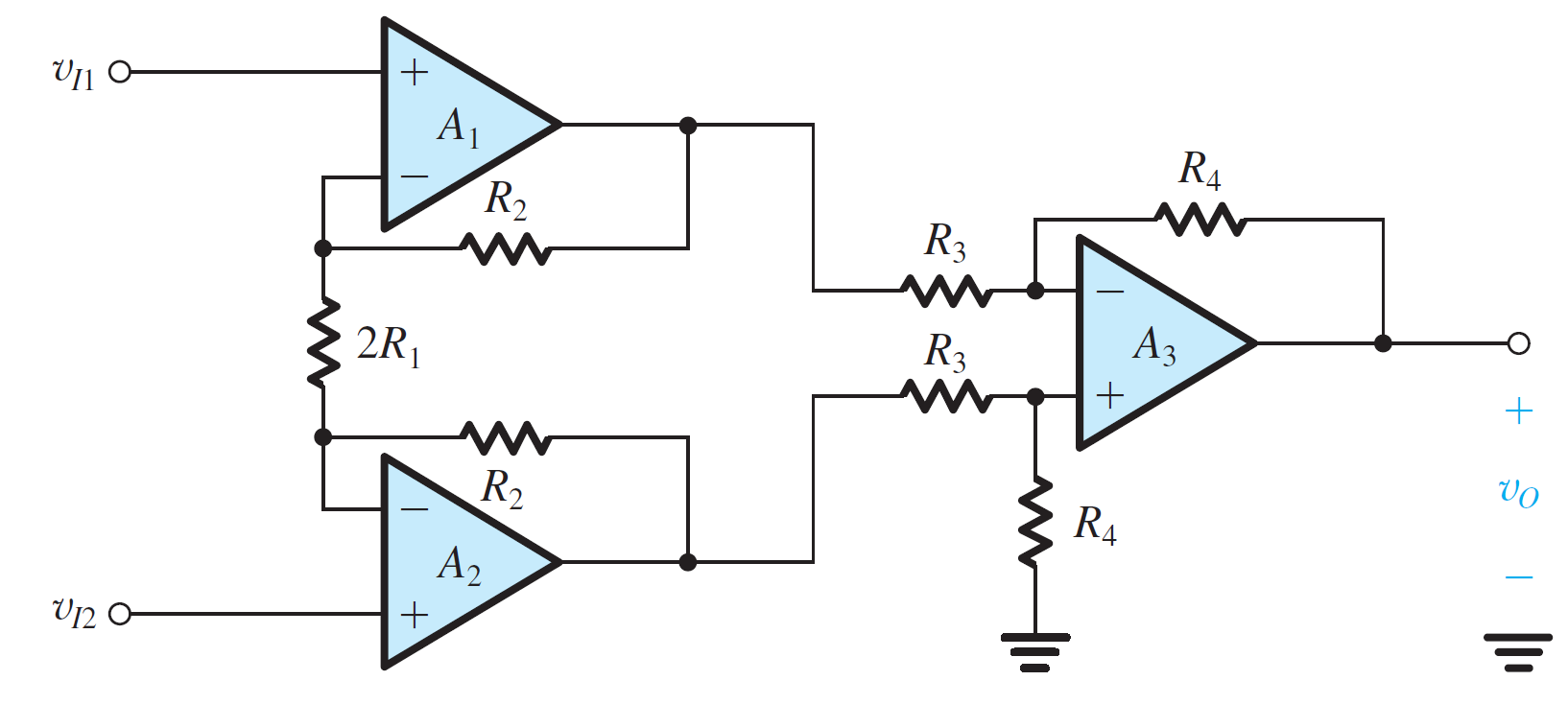
להלן המעגל החשמלי בצורה כזו העונה על החסרונות של מגבר הפרש בקונפיגורציה הקודמת
כאשר 2 המגברים בכניסה תפקידם להגביר את הסיגנל בהתאם לדרישה של “הגבר הפרש” תוך כדי יצירת התנגדות כניסה אינסופית )מה שאנחנו רוצים שיהיה למגבר( והמגבר השלישי תפקידו ליצור את ההפרש שבין האותות )המגבר בתפקידו המרכזי הינו מגבר הפרש(.
המגברים בדרגה הראשונה הינם בעלי הגבר של מגבר שאינו מהפך )
(.
כאשר המגבר השלישי בדרגה השנייה מבצע את פעולת ההפרש בין הסיגנלים,
בכניסה:
ובמוצא:
סך הכל ההגבר של מגבר המכשור הינו:
)כמובן שההגבר המשותף יהיה כאן
מחמת הדרגה השנייה(
גם למעגל זה מספר חסרונות:
- האות המשותף בדרגה הראשונה, בכניסה )
(, מוגבר בשלב הראשון באותו מקדם הגבר כמו האות ההפרשי )
(. מצב זה מהווה בעיה חמורה, שכן הוא עלול לגרום לכך שהמתחים ביציאות המגברים A1 ו־A2 יגיעו לערכים גבוהים מאוד, עד כדי רוויה של מגברי השרת. אך גם אם המגברים אינם נכנסים לרוויה, מגבר ההפרש בדרגה השנייה נדרש להתמודד עם אותות במצב משותף בעלי משרעת גדולה יותר, דבר שמוביל בהכרח לירידה ביחס דחיית המתח המשותף )
( של המגבר הכולל.
- דרישה להתאמה מושלמת בין ערוצי ההגבר בשלב הראשון שני ערוצי ההגבר בשלב הראשון חייבים להיות מותאמים באופן מושלם. כל חוסר התאמה ביניהם עלול לגרום להופעת אות שגיאה בין שתי היציאות, אשר יוגבר לאחר מכן על־ידי מגבר ההפרש בשלב השני, ובכך יפגע בדיוק המדידה.
- קושי בשינוי ההגבר ההפרשי שינוי ההגבר ההפרשי )
( מחייב שינוי סימולטני של שני נגדים )למשל, שני הנגדים המסומנים
(. בכל ערך הגבר נדרש שהנגדים יהיו מותאמים בצורה מושלמת, דבר המהווה משימה מורכבת וקשה למימוש בפועל.
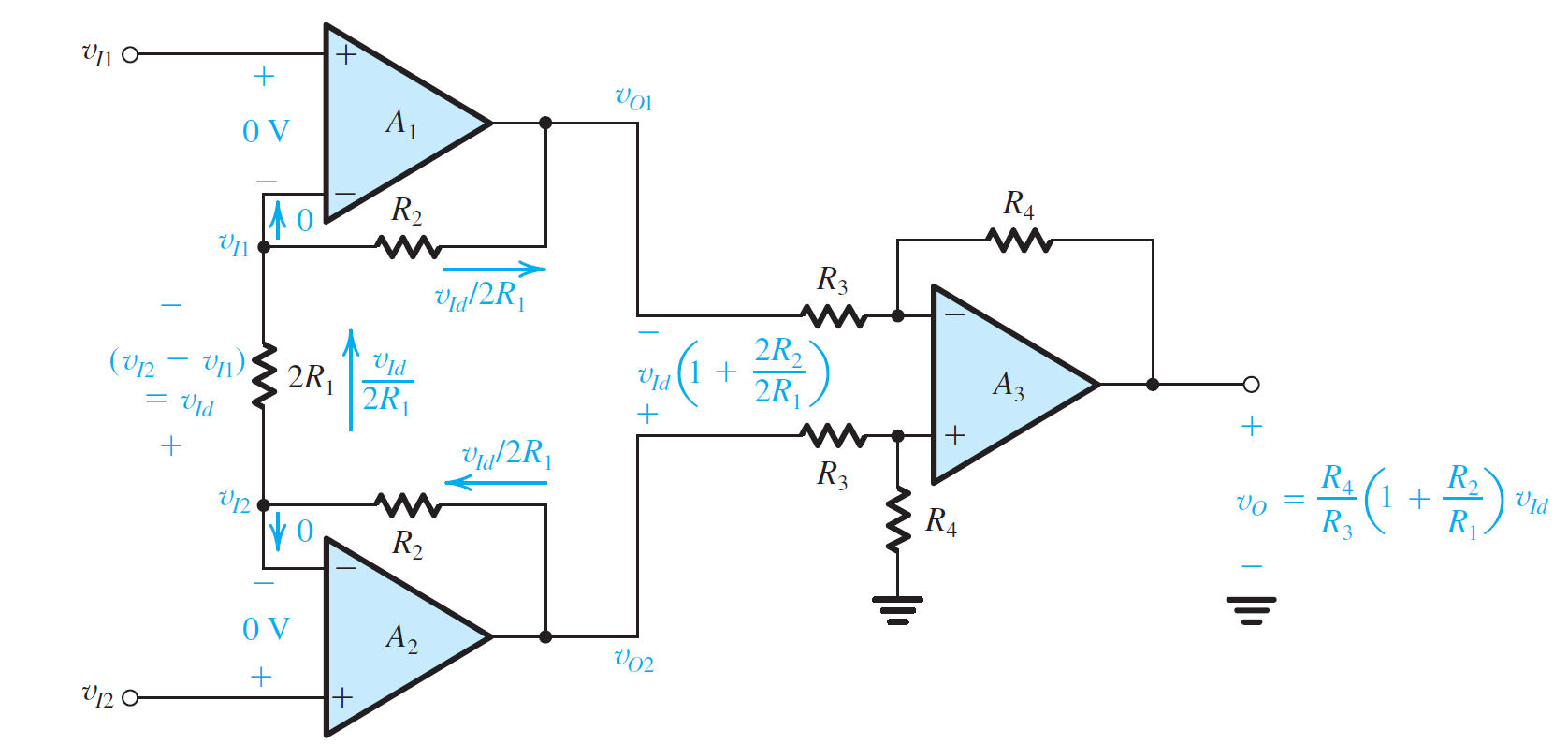
הפתרון לחסרונות הנ”ל הוא ע”י הוצאת נקודת הייחוס X שבין הנגדים
בדרגה הראשונה, כך:
והניתוח של המעגל הינו:
הרעיון הינו בכך שהקצר הוירטואלי שבין כניסות ה + ו - של מגבר שרת יגרמו לכך שעל הנגד
יפול המתח ההפרשי
ויגרום לזרם של
, זרם שיזרום בנגד
וכן ב 2 הנגדים
.
הזרם הנ”ל יצור הפרש מתחים במוצא של A1 ו־A2, כך:
והדרגה השנייה, המגבר A3 בעקבות הפרש המתחים יפיק:
סך הכל ההגבר הדיפרנציאלי הינו:
בתצורה זאת הדרגה הראשונה כבר לא תגביר את המתח המשותף אלא תעביר את רמת המתח המשותף כפי שהוא למוצאים של A1 ו־A2, וA3 “ידאג” לאפס אותו.
פרק 2 מסננים אקטיביים
אנחנו מכירים את המסננים הפאסיביים לדוגמה RC )נגד-קבל(, המשמשים להעברת הסיגנל בתדרים מסוימים או לדחות תדרים גבוהים\נמוכים ...
כדי לסנן תדרים בצורה מדויקת יותר, במבט הפאסיבי נדרש לרוב גם להשתמש בסלילים, לצורך הדוגמה ניקח מסנן LPF מסליל-נגד )LR(
אנו יודעים כי תדרך הברך של המעגל הינו
זהו חיסרון גדול עבור המעגלים הפאסיבים כאשר נרצה לעבור בתדרים נמוכים זה אומר שנדרש להגדיל את הסליל. סלילים גדולים הם רכיבים “מגושמים” ומוסיפים נפח ומורכבות למעגל.
חיסרון נוסף ומרכזי של מסננים פאסיביים זה הנטייה של האות לקבל ניחות )במידה וקרובים לתדרי תהודה אף הגבר(, מחמת המעבר של הסיגנל דרך המסנן. היינו “מעדיפים” שהשינויים בעוצמה לא יקרו עבור הסיגנל הנחוץ או שלפחות תהיה לנו שליטה על כך.
מחמת חסרונות כאלה שהוזכרו )ועוד..( המגבירים האקטיביים הינם חשובים בכך שנותנים מענה על המגבלה של המגברים הפאסיביים.
מסנן אקטיבי הוא מסנן המשלב הגבר, ולרוב מבוסס על מגבר שרת כרכיב האקטיבי. בשילוב עם נגדים וקבלים המסנן האקטיבי מצליח לספק ביצועי מסנן דמויי LRC בתדרים נמוכים. היתרונות העיקריים על פני מקבילים פסיביים הם:
- הם מסוגלים לבצע פונקציות סינון מורכבות ללא צורך במשרנים )סלילים(.
- מכיוון שניתן לשלוט על הגבר המסנן, ניתן ליישם מסננים בעלי מאפיינים שלא ניתן להשיג ממסננים פסיביים, כגון המרת עכבה שלילית.
- באמצעות שילוב של “בלוקים” בעלי הגבר הניתן לכוונון אלקטרוני, ניתן לממש מסננים בעלי מאפיינים משתנים הנשלטים אלקטרונית. מסננים אקטיביים נמצאים בשימוש נרחב לעיבוד והתאמת אותות במעגלים אלקטרוניים.
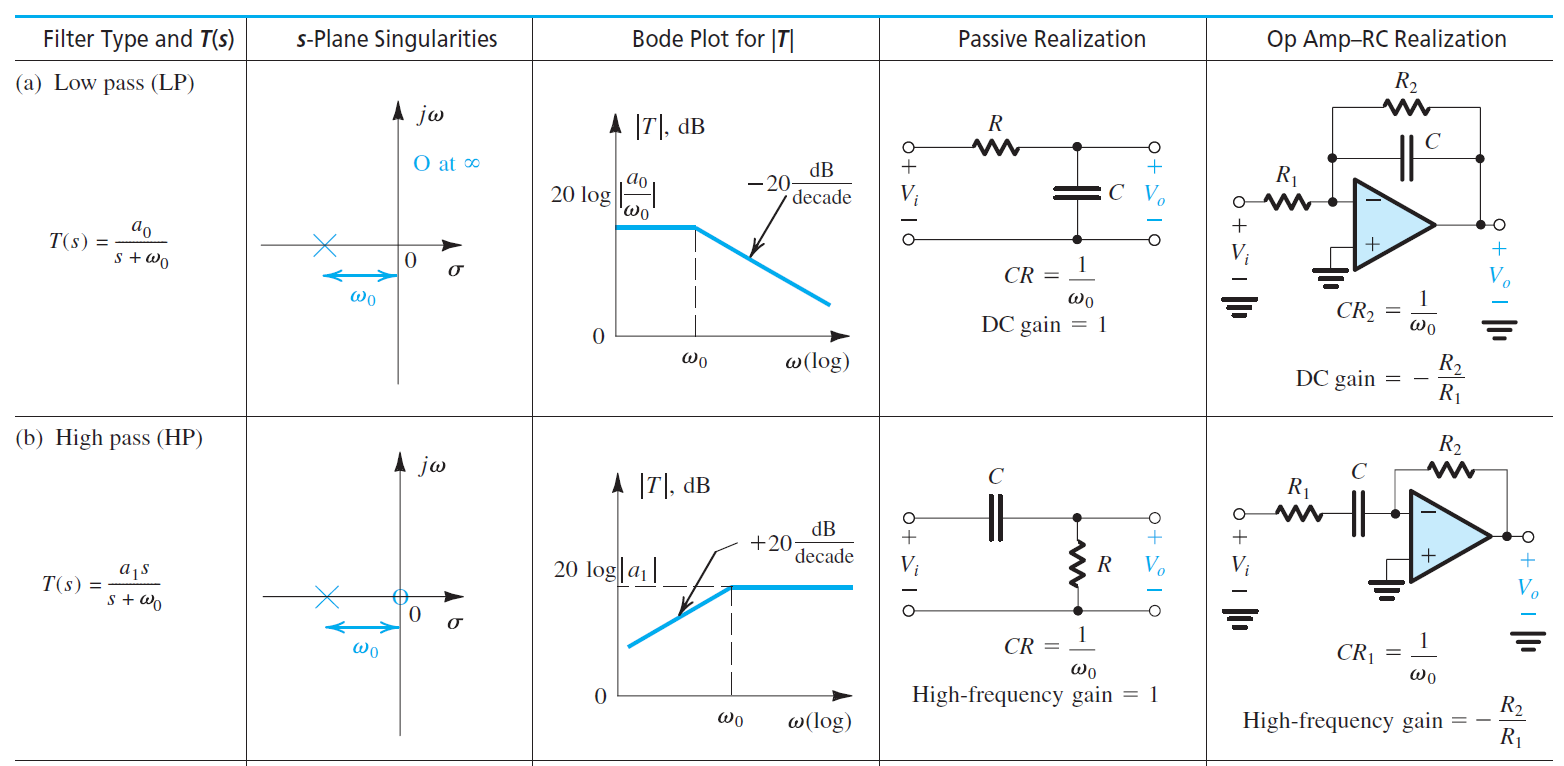
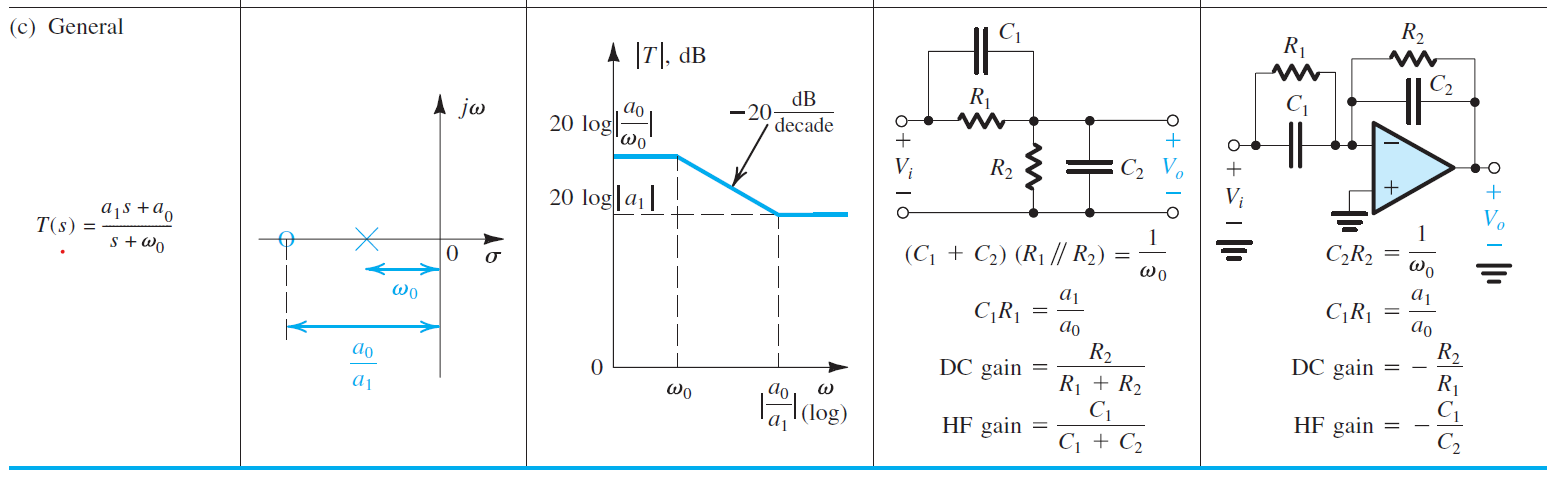
2.1 מסננים מסדר ראשון:
צורה כללית לפונקציית תמסורת מסדר ראשון הינה:
קוטב ב
ואפס ב
, הגבר של
עבור התדרים הגבוהים והגבר של
עבור DC.
המקדמים של המונה
ו
קובעים את סוג המסנן.
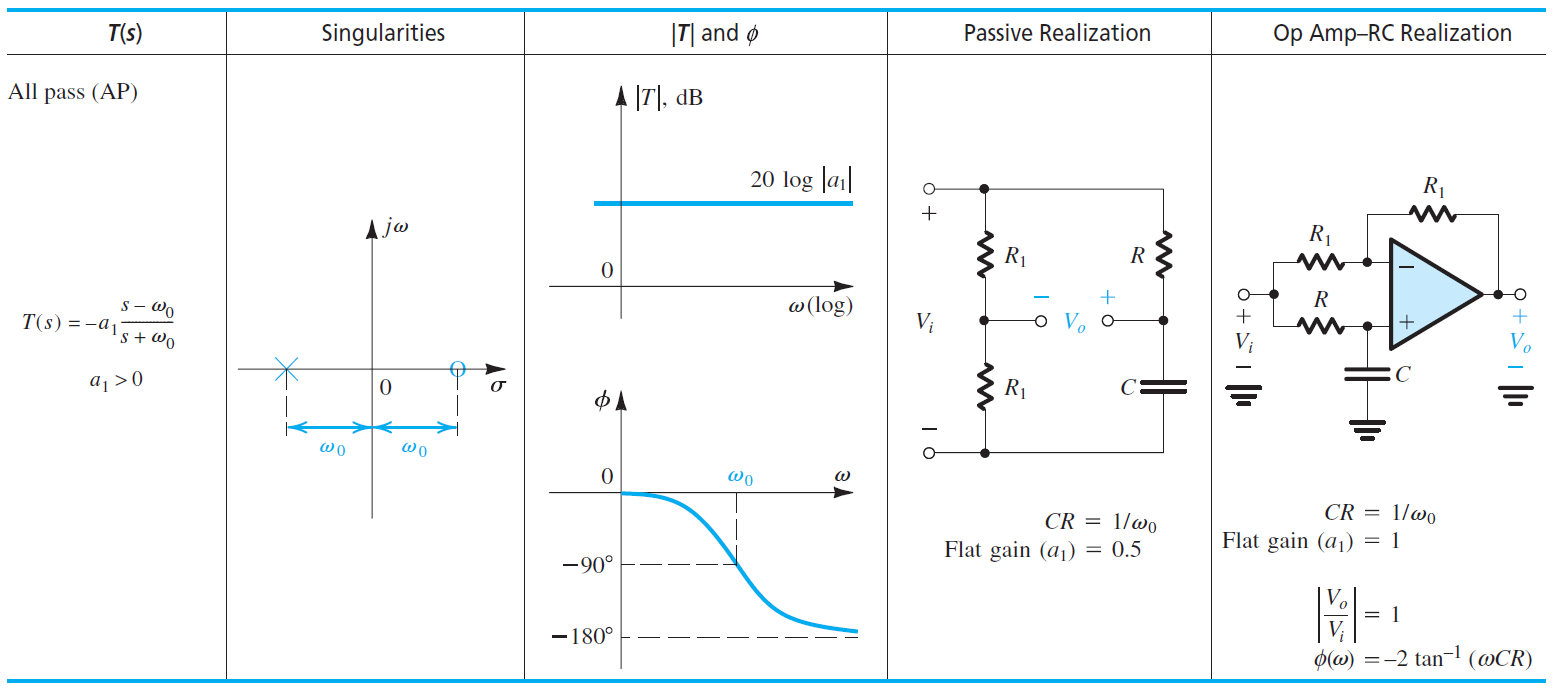
להלן איור המסכם את המימושים באופן הפאסיבי והאקטיבי של מסננים, ניתן להבחין בכך שלמסננים האקטיביים ישנה שליטה פרמטרית רחבה יותר ביחס למסננים הפאסיביים.
לרוב ההגבר ניתן לכיול לפי רצוננו )במגברים האקטיביים( כאשר פרמטרי פונקציית התמסורת יכולים גם הן להיות מותאמים ללא הפרעה אחד לשני.
בנוסף אימפדנס המוצא של מסנן אקטיביהינו נמוך מאוד, כך שחיבור קאסקאדי מתאפשר בקלות. )חסרון למגבר שרת במסננים הינו המגבלה על פעולה בתדרים גבוהים(
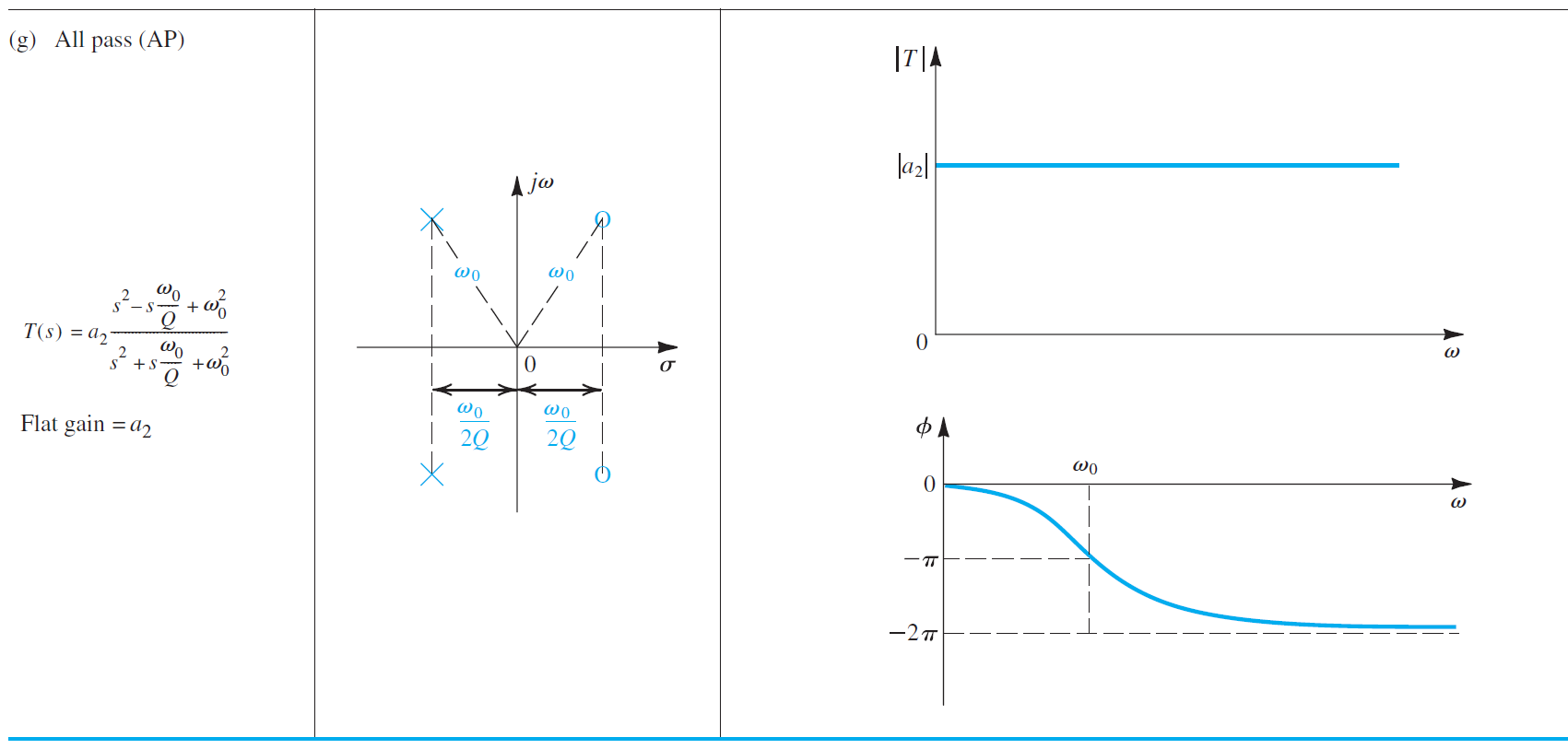
מסנן All-Pass הוא מקרה מיוחד של מסנן מסדר ראשון. במסנן זה הקוטב והאפס ממוקמים בצורה סימטרית ביחס לציר
. למרות שההגבר של המסנן קבוע בכל התדרים, הפאזה שלו משתנה עם התדר. לכן מסנני All-Pass משמשים להזזת פאזה ולעיצוב תגובת הפאזה של מערכות, למשל במעגלים שמטרתם לשמור על השהיית זמן קבועה בכל התדרים )Delay Equalizers(.
2.1.1 דוגמה:
תכנון מסנן HPF עם תדר ברך של
והגבר-תדרים-גבוהים של 10.
נתחיל במימוש הפאסיבי, מתקיים
ניתן לבחור
והקבל בהתאם
.
לא ניתן לממש באמצעות הדרך הפאסיבית הגבר לתדרים גבוהים של 10 מחמת אופי הפונקציה
, ניתן לראות כי ההגבר גבוהים הינו 1.
במימוש האקטיבי לעומת זאת יש לנו שליטה על הגבר התדרים הגבוהים לפי יחס נגדים לכן נבחר את
)כאשר
(.
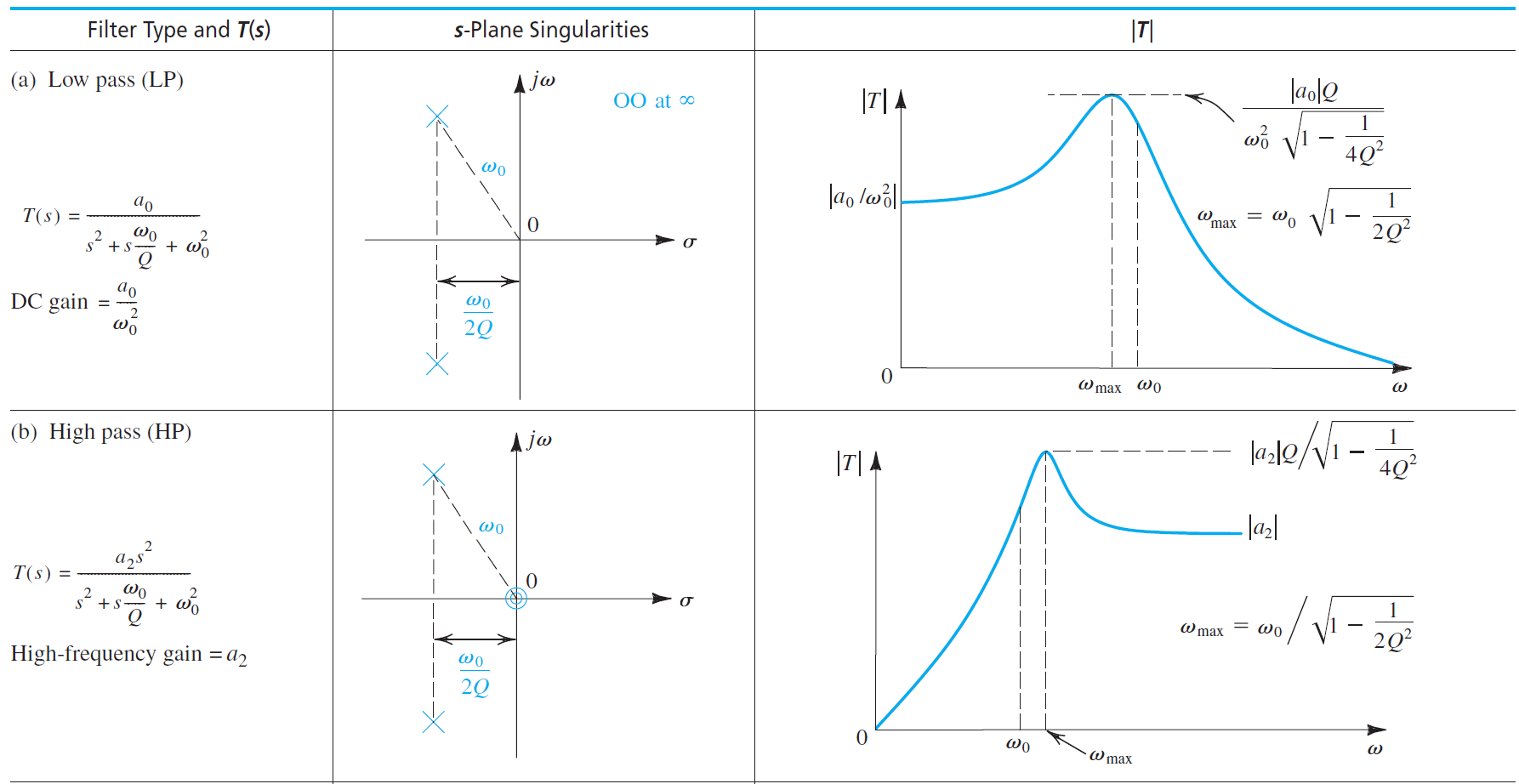
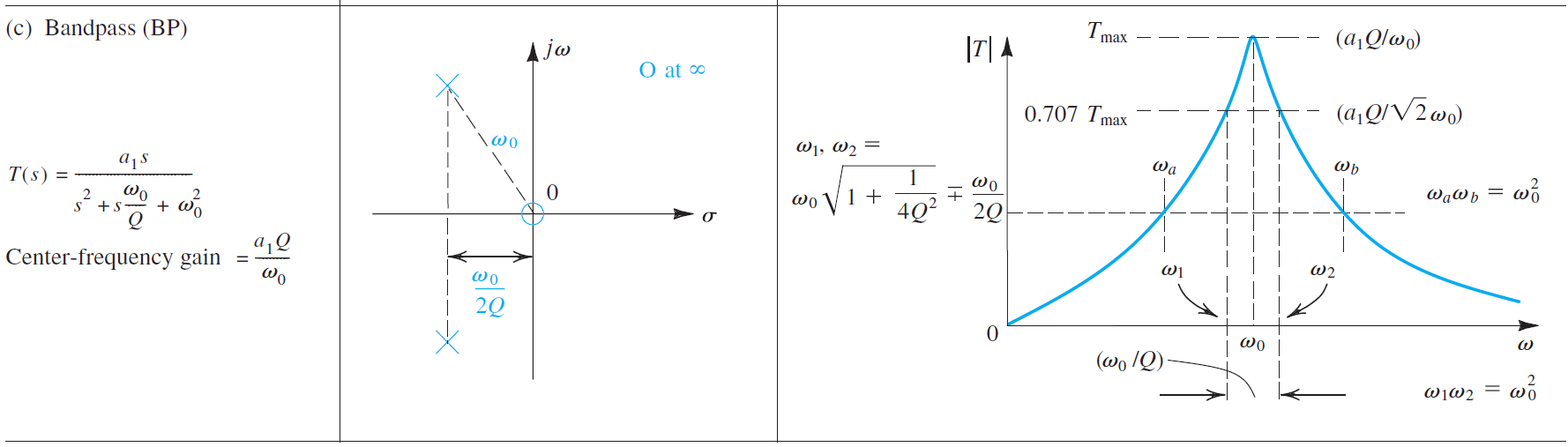
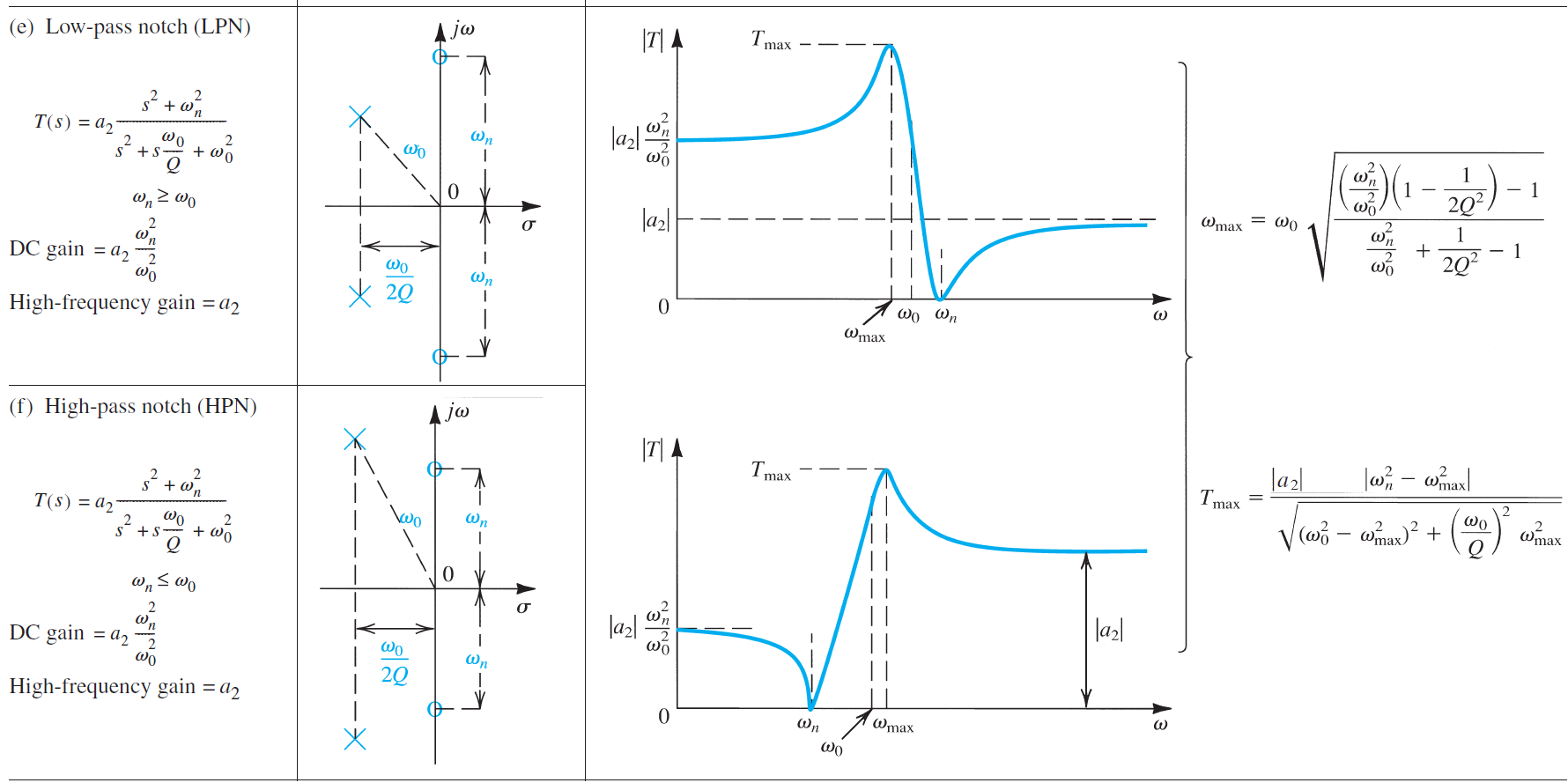
2.2 מסננים מסדר שני:
במסננים מסדר זה היישום בצורה הפאסיבית מגביל אותנו מאוד והמימוש האקטיבי מאפשר לנו שליטה רחבה יותר.
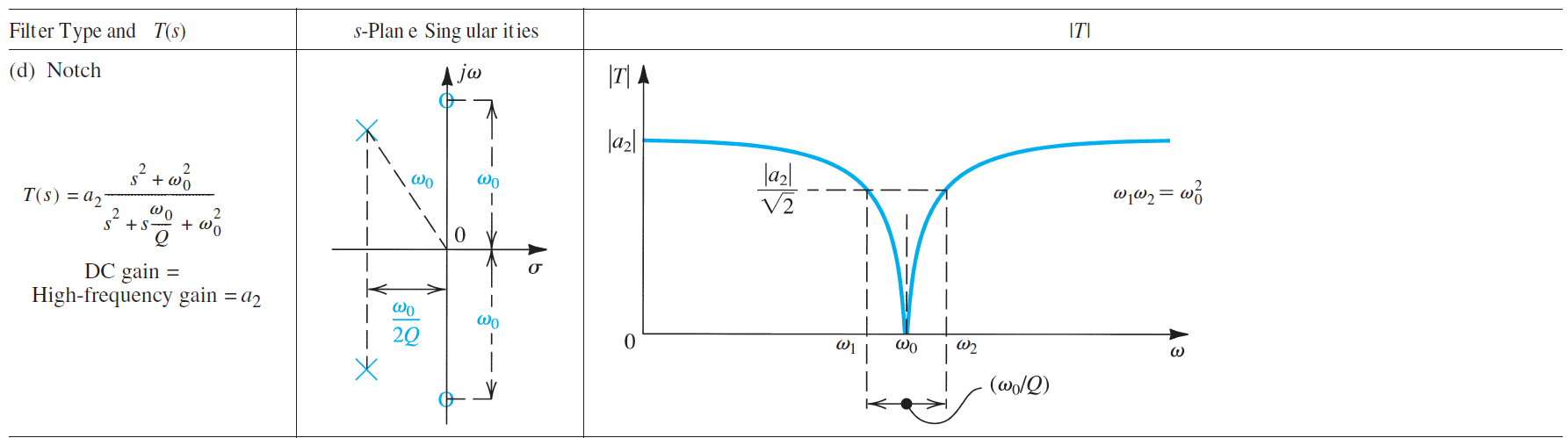
הצורה הסטנדרטית למסנן מסדר שני:
כאשר
ו
קובעים את מיקום הקטבים )אופי הדינאמיקה(:
נשים לב כי עבור Q קטן מ 0.5 נקבל קטבים על הציר הממשי. כשרוצים לממש מסנן נרצה שיהיה תדר תהודה למערכת ושיהיה מגבלות תדרים, כך שחלק מהתדרים עוברים וחלקם נעצרים. לפיכך מימוש של Q קטן מ 0.5 אינו טוב עבור מסננים.
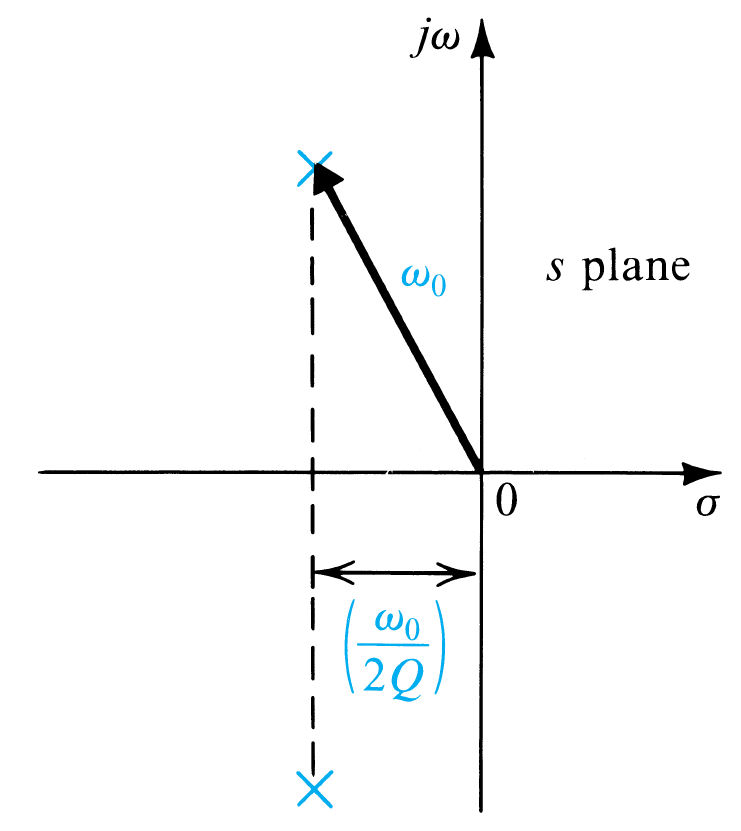
נשים לב לאיור הבא המציג את מיקום הקטבים עבור Q גדול מ0.5. עבור Q גדול הקטבים מתקרבים לציר המדומה והמסנן הופך להיות לסלקטיבי יותר. עבור Q אינסופי, הקטבים למעשה ממוקמים על הציר המדומה עצמו מה שיכול להוביל לאוסילציות מתמשכות )ללא דעיכה( במסנן. Q שלילי יביא לכך שהקטבים יהיו בחצי הימני של מישור s, זה מצב שיביא לתנודות במערכת והמערכת אינה יציבה.
Q נקרא pole quality factor = pole Q, בעברית מקדם האיכות.
המונה של פונקציית התמסורת למעשה מכיל את האפסים של המערכת והם תלויים במקדמים a0, a1 ו a2. כאשר מקדמים אלו יקבעו בסופו של דבר את סוג המסנן )LPF HPF וכדו(.
2.3 ריאליזציה
ריאליזציה זה המימוש לפונקציית התמסורת באמצעות רכיבים )המעגל החשמלי המעשי(. באופן כללי לתמסורת מסדר שני ישנם שני פרמטרים הנקבעים מראש עבור התכנון,
ו Q, והם תלויים ברכיבי המעגל. לדוגמה עבור המימוש הפאסיבי נראה בהמשך עבור מימוש LPF את התלות הבאה
. סך הכל נקבל 2 משוואות בשלושה נעלמים, החופשיות של משתנה אחד מתוך השלושה נותן לנו חופשיות לבחירת ערכים של רכיבים מעשיים.
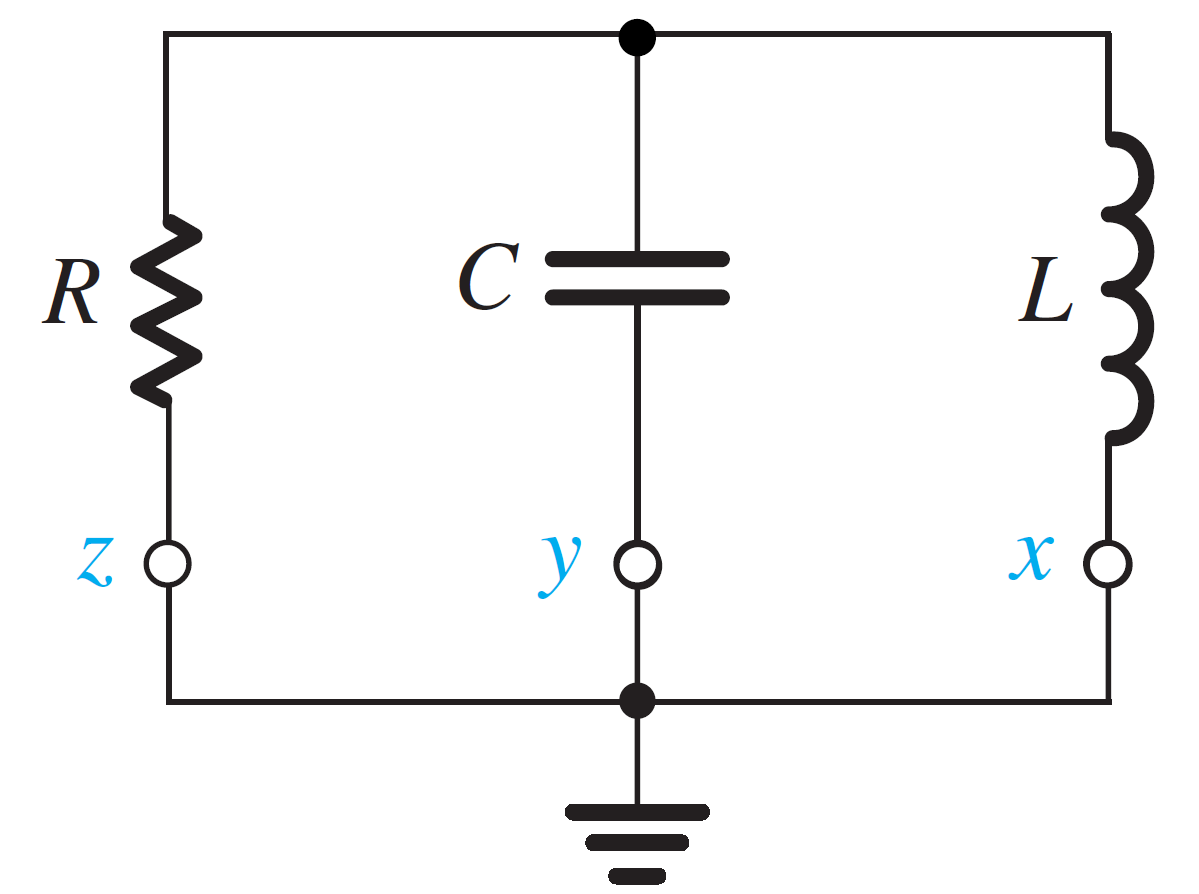
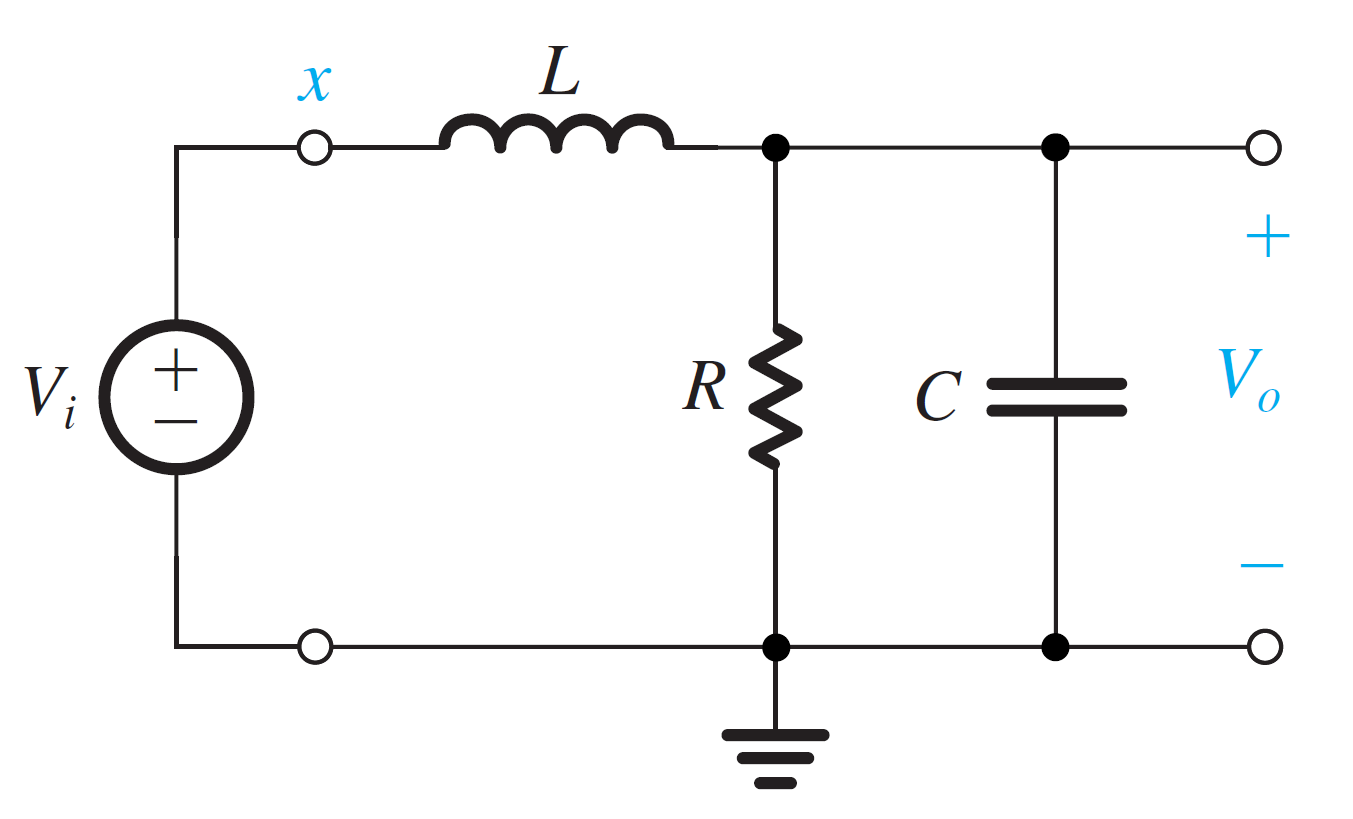
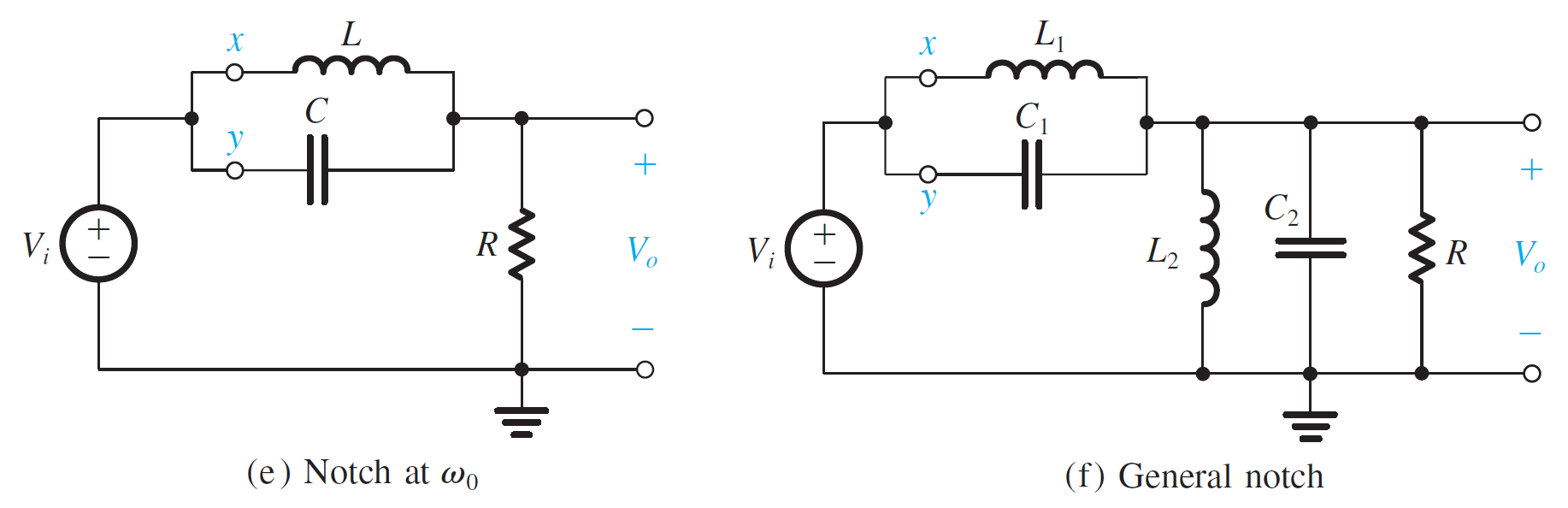
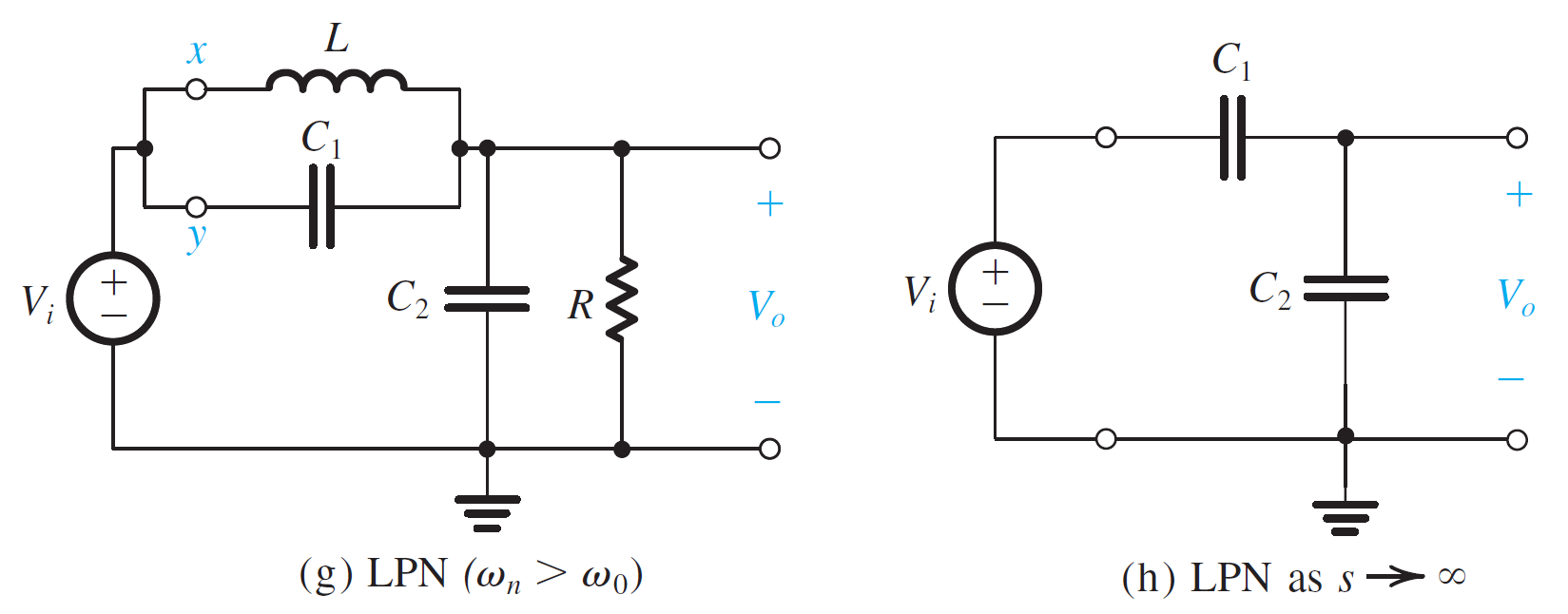
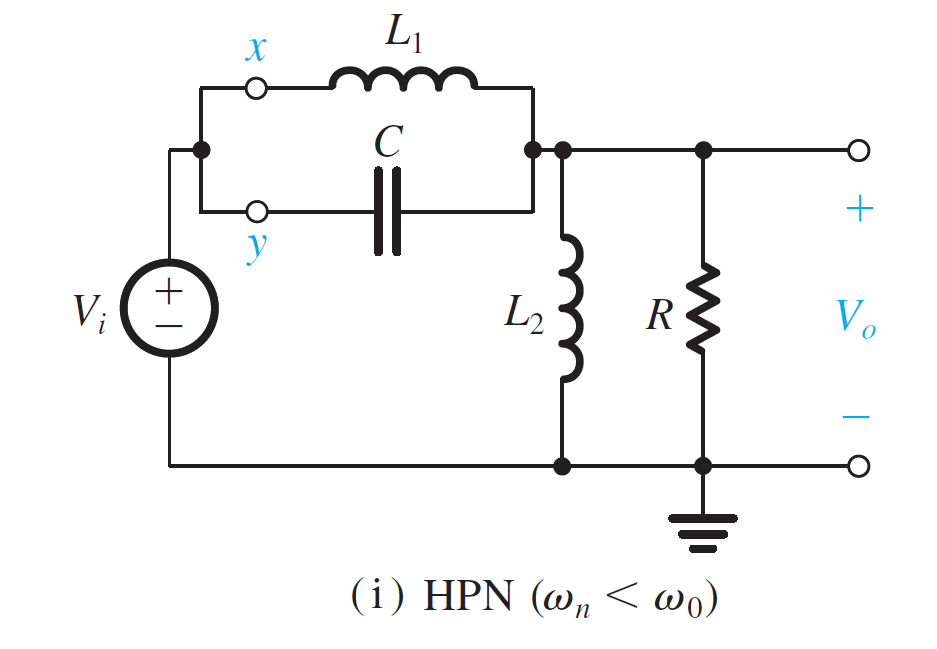
נתבונן במעגל הבא:
המעגל הזה הינו בסיסי ויסודי למימוש מסנן. זהו מעגל תהודה. נציין כי תהודה הינה תכונה טבעית של המעגל ולכן אם לדוגמה אנחנו ננתק את צומת x ונחבר לשם מקור מתח אידיאלי לצורך עירעור המעגל )כדי לבדוק את תכונות המעגל יש לערער אותו(, אזי תכונות התהודה לא ישתנו והמקור מתח יתנהג כקצר )עבור ניתוח התהודה( ולכן למעשה לא עשינו שינוי במעגל מבחינת טבעו.
להלן תיאור הניתוק של צומת x וחיבורו למקור מתח אידיאלי:
באופן דומה ניתן לנתק כל צומת )x y ו z( ולחבר מקור מתח אידיאלי ללא גרימת שינויים לתכונה הרזוננטית של המעגל )כי מקור מתח אידיאלי מתנהג כקצר עבור הניתוח הרזוננטי. ניתן להסתכל על זה כסופרפוזיציה של מקורות, מקור המתח החיצוני לצורך העירעור ומקור מתח מתוך תכונות התהודה של המעגל(.
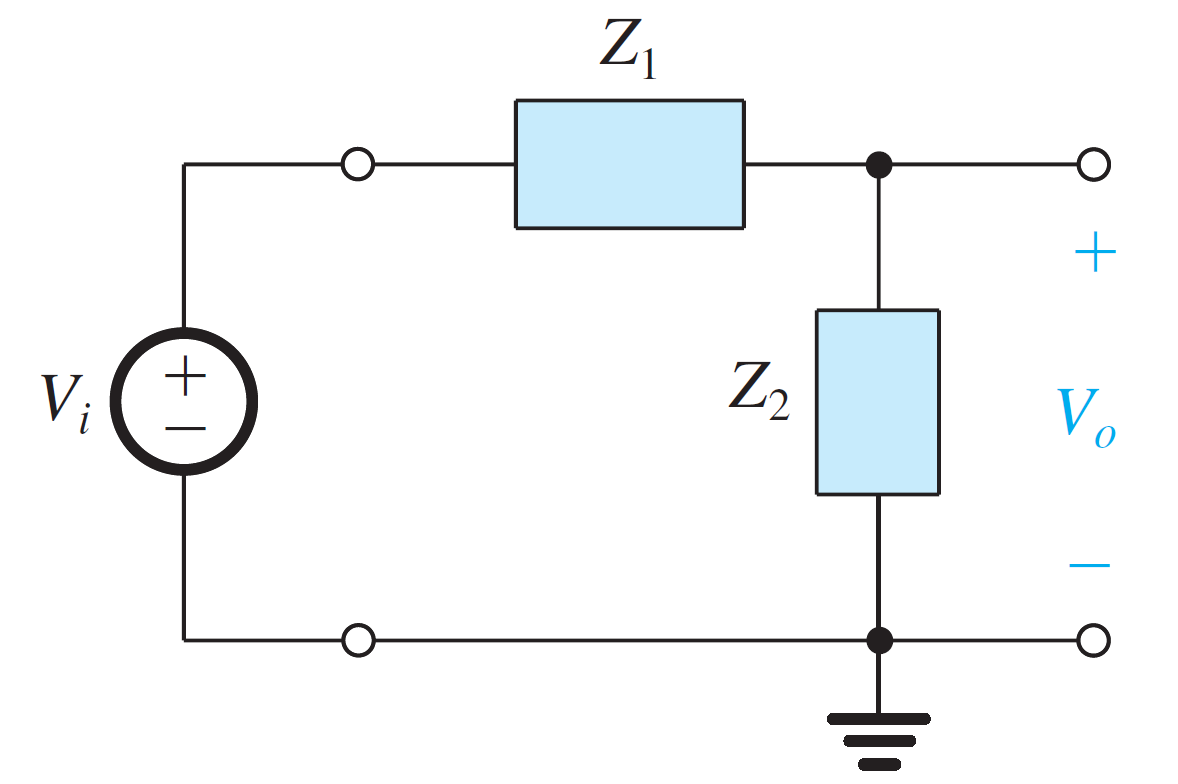
באופן כללי ניתן לפרק את מעגל התהודה שראינו למחלק מתח, כך שבצורה הכללית נקבל את הצורה הבאה:
כך שפונקציית התמסורת עבור המימוש תהיה:
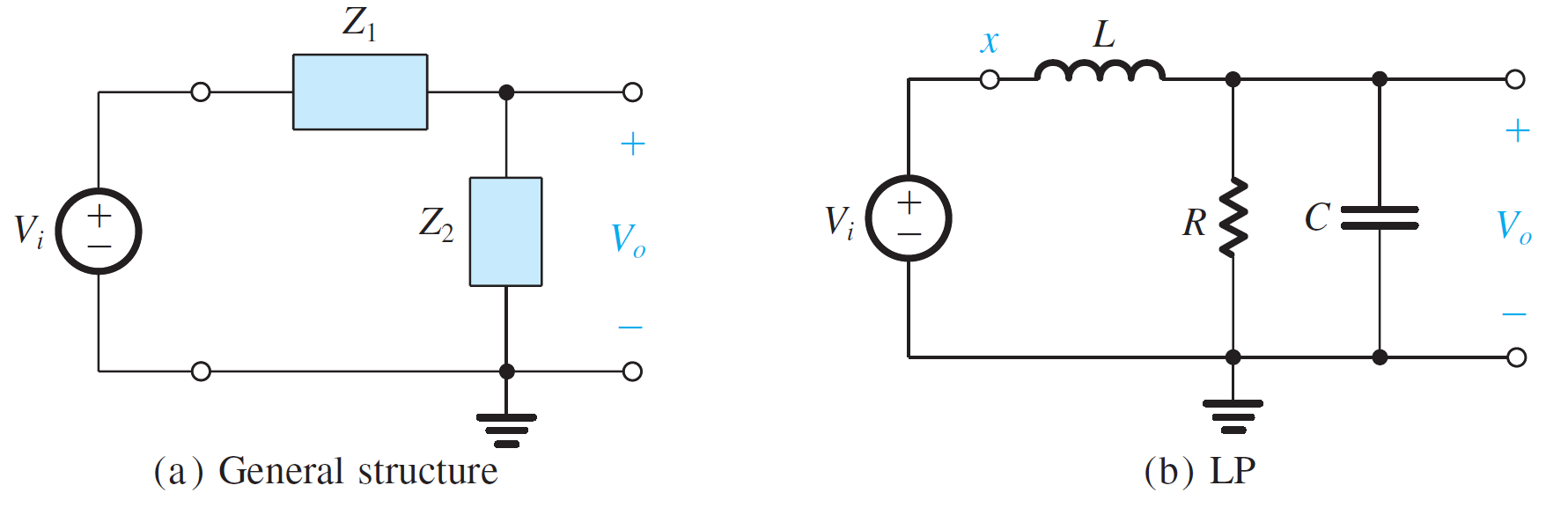
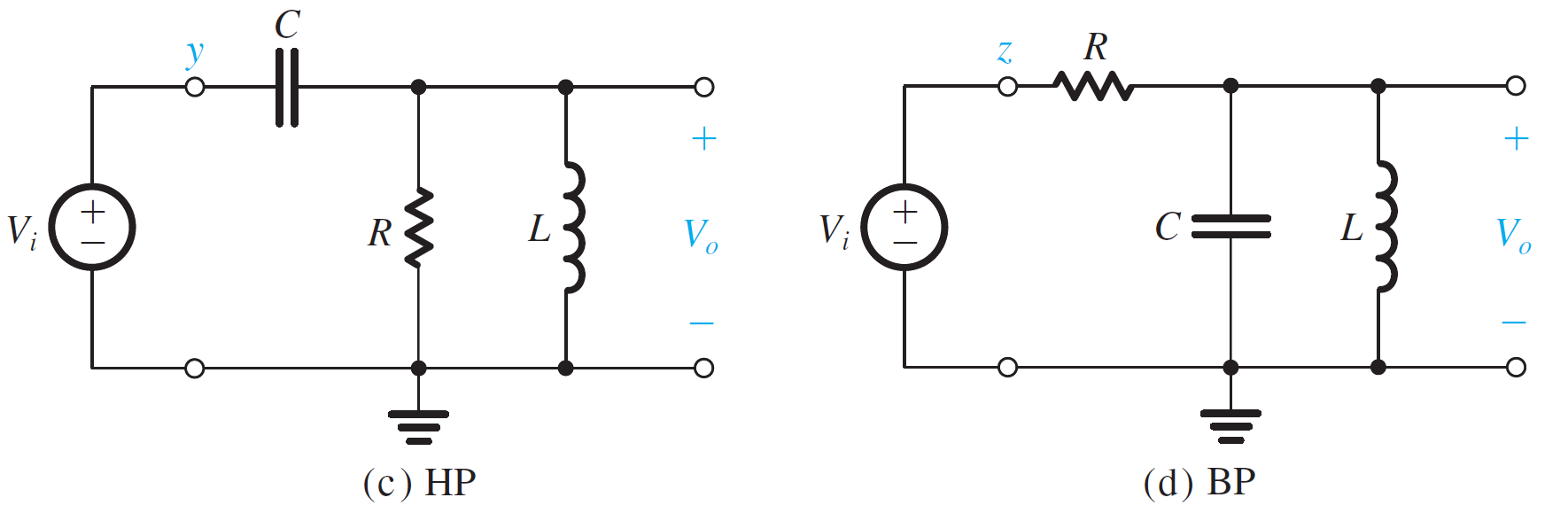
להלן תיאור סכמתי של מימושים שונים של פונקציות תמסורת מסדר שני שתוארו לעיל:
2.4 ריאליזציה LPF:
משתמשים במעגל הבסיסי הרזוננטי, מנתקים צומת x ומחברים אותו ל
.
האפסים של המערכת הינם בהתאם לפונקציית התמסורת של מחלק מתח
2.3.1, כאשר פונקציית התמסורת תהיה אפס או כשהאימפדנס הטורי )
( יהיה אינסופי כלומר
)ככה
“הולך” לאינסוף(, או כשהימפדנס המקבילי )
( הולך לאפס, כלומר
מתאפס )זה קורה גם כן כש
( סך הכל ישנם שני אפסים באינסוף כפי שאכן אמור להיות לפונקציית תמסורת מסוג LPF מסדר שני.
להלן פונקציית התמסורת של ה LPF:
כדאי בהזדמנות להרחיב כאן את התיאורייה.
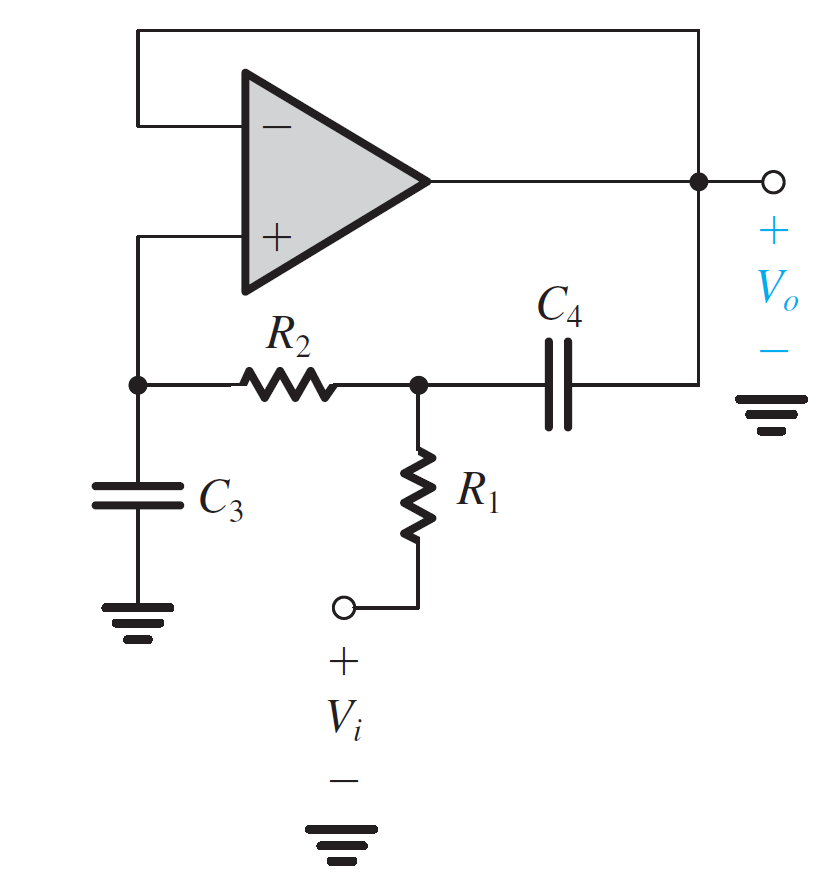
ישנם כמה שיטות למימוש מסננים באמצעות מגברי שרת. אחת מהן הן באמצעות מעגלי סאלן.
פרק 3 ניסוי מסננים אקטיביים
בניסוי זה נעשה שימוש במעגלי Sallen-Key מעביר נמוכים ומעביר גבוהים.
3.1 חשיבות מעגלי Sallen-Key:
נקדים כי לרוב )כמעט תמיד( עבור מסננים נרצה כי מקדם האיכות Q יהיה גדול מ 0.5.
למעשה Q מביא לנו מדד לכמות השיכוך )ריסון( שיש למערכת, מביא לנו מדד לחדות המעבר סביב תדר הברך וכן מביא לנו יכולת להסיק האם הקטבים יכולים לאגור אנרגיה )תהודה(.
| Q value | Behavior |
| ------------ | --------------------------------------------- |
| Very small Q | Very heavy damping → very slow, soft roll-off |
| Q = 0.5 | Critically useful boundary |
| Q > 0.5 | Sharper cutoff, better frequency selectivity |
| Q = 0.707 | Butterworth (flat passband) |
| Q > 1 | Resonance / peaking |
כאשר
המערכת הופכת להיות מרוסנת במידה רבה, הקטבים ממשיים )ויכולים להיות רחוקים אחד מן השני(, כך שאין אינטראקציה בינם וסך הכל מקבלים התנהגות של שני מסננים מסדר-ראשון בלתי תלויים אחד בשני. כך שהסלקטיביות ירודה )לא טובה(, רוחב פס המעבר )בין התדרים הרצויים ללא רצויים( הינו רחב מאוד.
בנוסף אנו רוצים מסנן מסדר שני כדי להביא לכך שה roll-off )השיפוע של ההגבר בודה( יהיה
אך בפועל עבור
נקבל את המענה אסימפטוטית, אך בתדרים רחוקים מאוד מנקודת המעבר )כלומר תדר הברך( אך העניין שלנו פרקטית הינו דווקא דרישה ל
בנקודת המעבר ולא אסימפטוטית, ובנקודת המעבר עבור
השיפוע ממש קטן יחסית ל
. )ההתנהגות סביב תדר הברך ובאיזור רחב כלפיו הינה של
(.
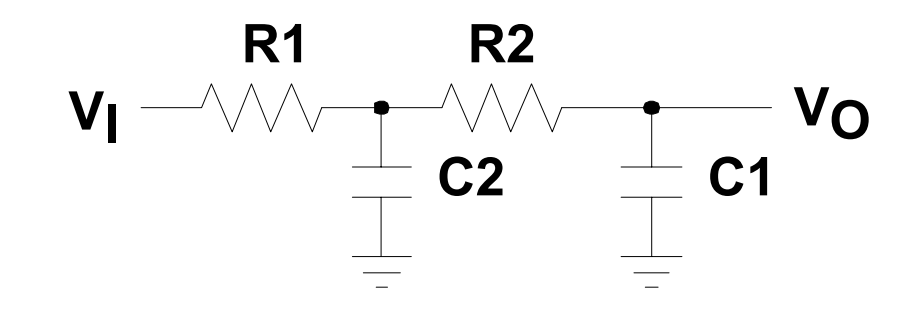
אנו יודעים כי סלילים תופסים נפח רב ולכן אינם רצויים ביישומים אלו. נניח ונרצה ליישם מעגל סדר שני עם שני מעגלי RC מחוברים קאסקאדית, כך
ניתן להראות כי פונקציית התמסורת תראה כך
פרק 6 תוספות:
6.1 קצב שינוי הגבר האות, dB לדקדה )x10(
נראה כאן מדוע עבור סדר ראשון הקצב הוא 20 dB לדקדה, ועבור סדר שני 40 וכן הלאה.
צורה כללית של מסנן סדר ראשון:
כאשר הגבר האות יהיה )מתקבל ב
(:
.
נקבל כי עבור תדרים נמוכים )
(:
,
לעומת זאת בתדרים גבוהים )
(:
.
כדי לבדוק את קצב שינוי ההגבר לדקדה, ניקח הפרש )דלתא
( של x10 בתדר )דקדה יחידה(:
.
ואכן הוכחנו שינוי של
לדקדה עבור תמסורת מסדר ראשון.
עבור סדר שני:
הצורה הכללית הינה:
,
עבור תדר נמוך נקבל )
(:
ועבור תדר גבוה )
( נקבל:
ובאותו אופן שניתחנו לסדר ראשון, כאן )עבור סדר שני( נקבל שינוי של
לדקדה.
כאשר הכלל הוא:
| Order |
Denominator term |
Asymptotic slope |
Phase shift |
|
|
|
–20 dB/dec |
–90° total |
| 2nd |
|
–40 dB/dec |
–180° total |
| n-th |
product of n terms |
–20 n dB/dec |
–90° × n total |